Requesting Missions
To trigger a mission in helyOS core, a new instance of the WorkProcess must be created. The WorkProcess is a generic process entity that can be used to create any kind of mission.
The WorkProcess has the following fields:
id: The unique identifier of the mission.
status: The status of the mission: draft, dispatched, executing, succeeded, failed, canceling, canceled.
workProcessTypeName: The type of the mission or the name of the mission recipe. The type of the mission is defined by the WorkProcessType.
data: The data of the mission. The data of the mission is a JSON object that contains the parameters of the mission.
agentIds: The agents that are assigned to the mission. The agents are defined by the Agent type.
To ensure that the mission is executed correctly, the WorkProcess must be created with the following status:
draft: The mission is created but not dispatched. This state is useful to save the mission in the database and make modifications before dispatching, or to add it to a MissionQueue. To dispatch the mission, the status must be changed to dispatched.
dispatched: As soon as a WorkProcess is created with the status dispatched, or the status of a WorkProcess is changed to dispatched, helyOS will trigger a series of events to execute the mission. These events include the reservation of the agents, the calls to relevant microservices, and finally the dispatch of assignments to the agents.
Handling the Mission Execution
While the mission assignments are being actively executed, the status of the WorkProcess will be executing. If one of the mission assignments fails, the status of the WorkProcess will be failed. If all the mission assignments succeed, the status of the WorkProcess will be succeeded.
If the client application wants to cancel the mission, the status of the WorkProcess must be changed to canceling. This will trigger the canceling of all pending microservice requests, the canceling of all running and pending assignments, and it will signal the release of all agents from the mission. Only after the succession of all these events, the WorkProcess will be automatically changed to canceled.
Reguarding the state flow of the WorkProcess, the client application should not forcefully change the status of the WorkProcess to executing, succeeded, failed, or canceled. Usually we have the following state flow:
The dispatched is automatically changed to executing or failed.
The executing is automatically changed to succeeded or failed.
The canceling is automatically changed to canceled.
Note
In principle, you can cancel an individual assignment by changing is status to canceling, this will result in a cancel instant action sent directly to the agent. However, this may lead to an inconsitent state of the mission, therefore is recommended to cancel the mission, as described above, rather than cancel individual mission assignments.
Working with Mission Queues
External applications connected exclusively to the helyOS core are inherently limited in their ability to directly modify ongoing missions. They can either make adjustments to an ongoing mission via instant actions (Instant Actions) or cancel the mission entirely.
Substantial modifications to an ungoing mission must be considered in advance when defining the microservices orchestration or programming actors that react to the mission within the autonomous domain.
However, for developers seeking flexibility in modifying complex missions from external applications, an alternative approach involves redefining these missions as a series of simpler missions and organizing them within a MissionQueue
For example, consider the scenario where a robot must to capture images of an object at a designated location. Such mission could be redefined as three simple missions: “go_to_location”, “take_picture”, “return_to_base”.
The developer would create the MissionQueue “Get Picture”, create the three WorkProcess entities with the status draft, and associate them to the “Get Picture” queue, via the queue_id property.
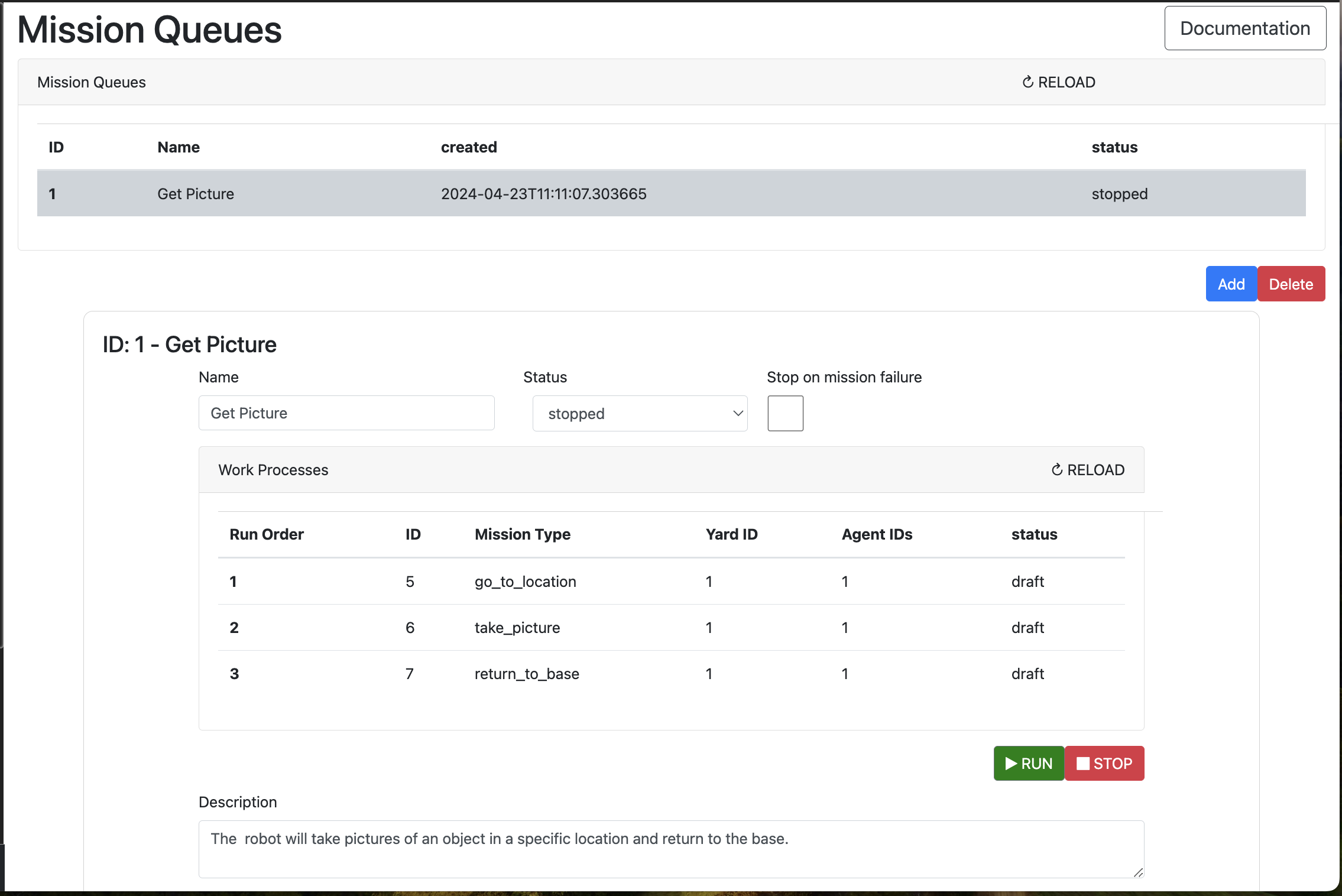
As soon the MissionQueue status is changed from stopped to run, the helyOS core will dispatch the missions in the specified order. This allows the application user the ability to pause, resume, add, or substitute subsequent missions in the queue, providing greater autonomy over mission execution.